AMW Pneumatic Manifold
2022 - For Amorphic Robot Works

Chico from AMW requested a lightweight pneumatic manifold for a soft robotic sculpture that would mount control circuitry. I proposed using SLA resin for its non-porous properties and ability to produce print-in-place 10-32 threads with required precision.
Design Process
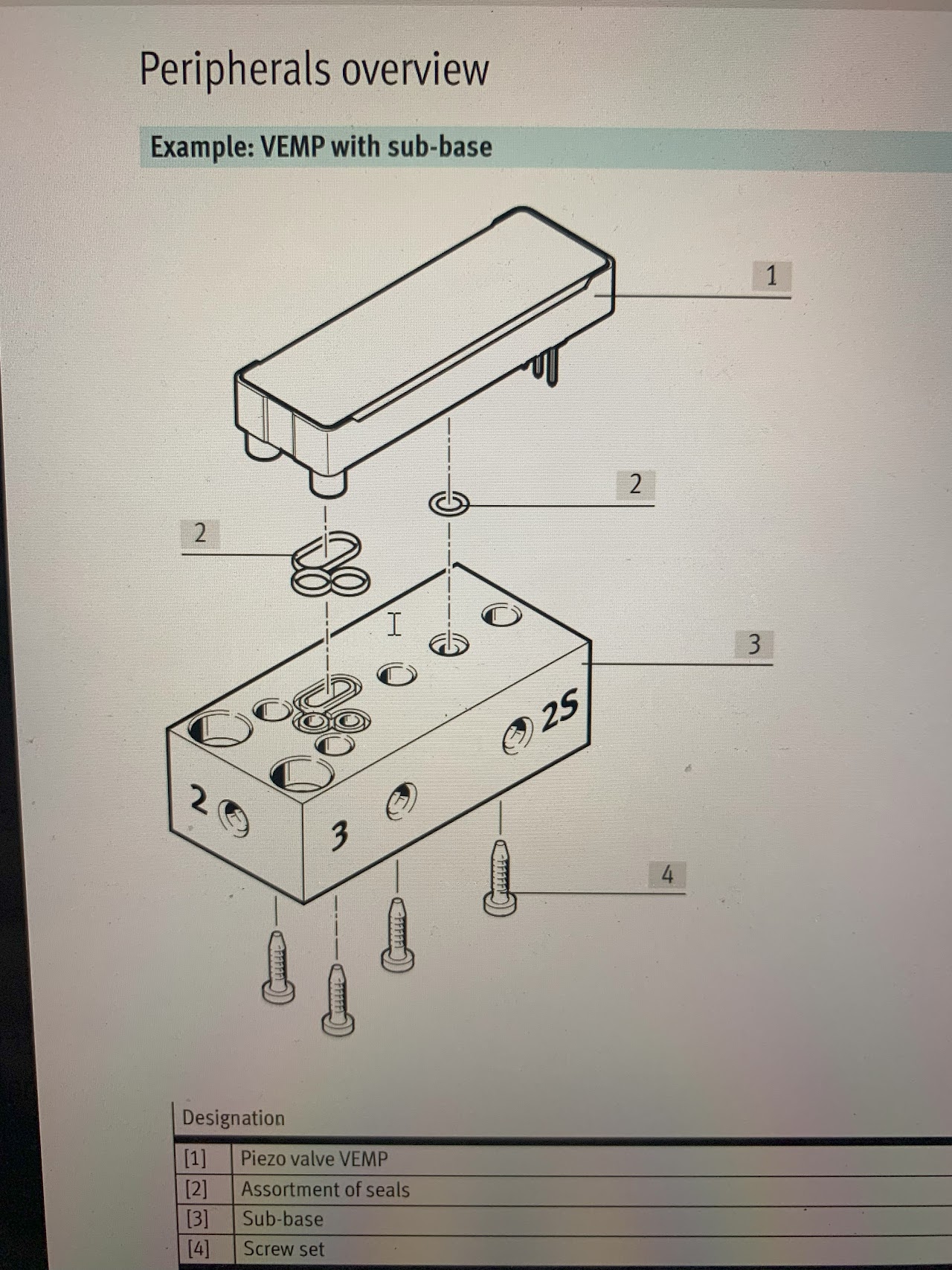
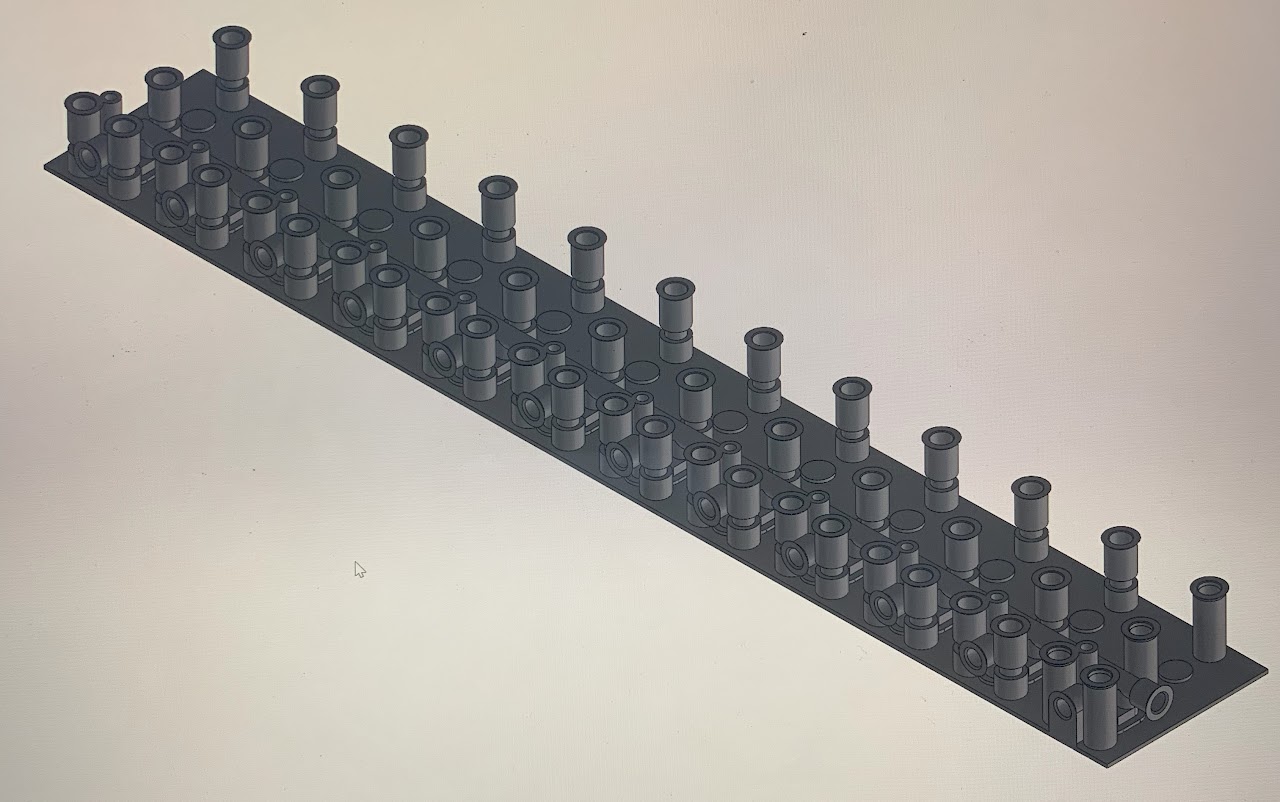

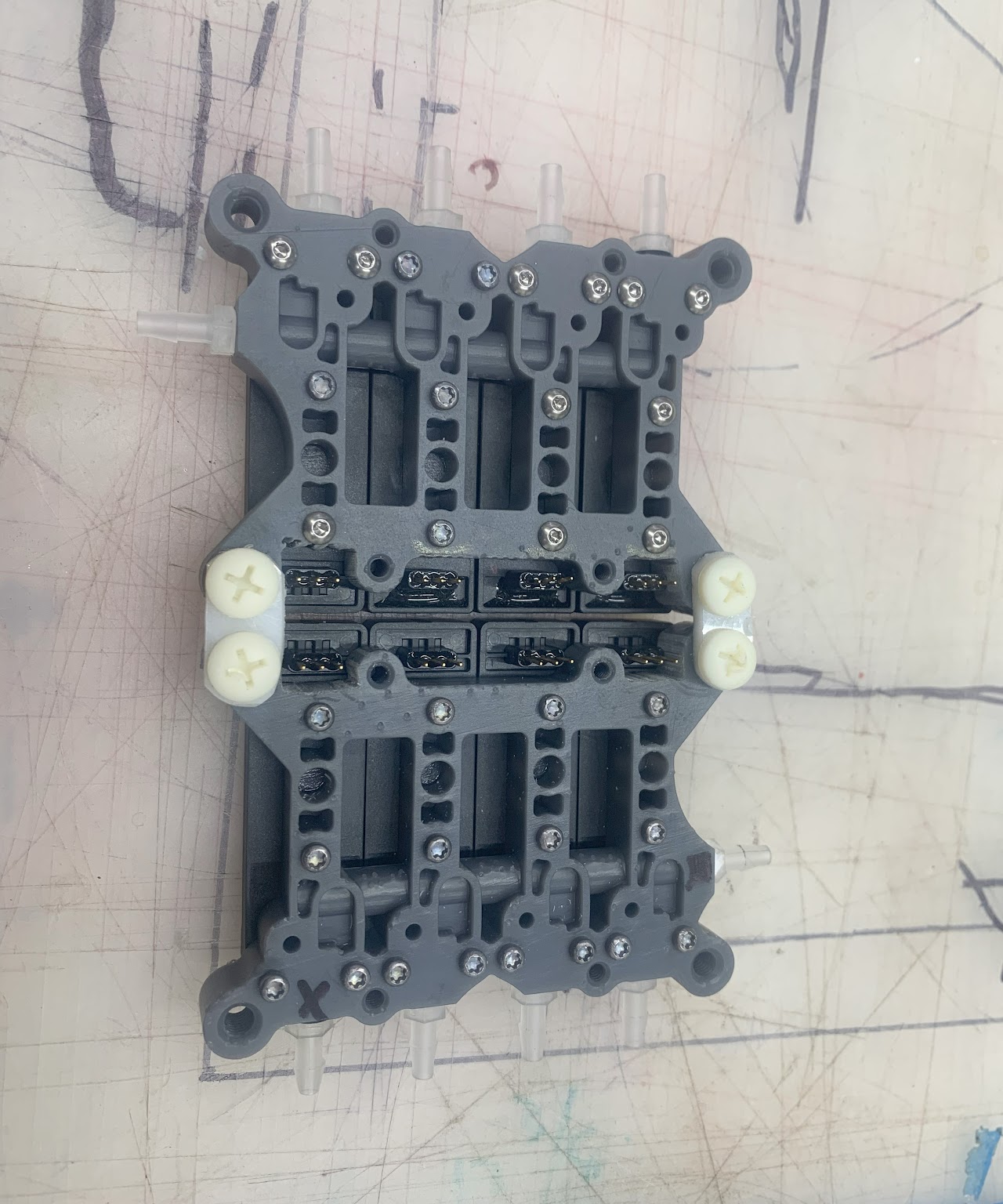
The manifold's air pathways were engineered using specifications from a 240V Piezo valve manufacturer. I built critical features modularly to enable future iterations. As the project progressed, the team moved from an initial single-unit design to a configuration with valves clustered in sets of four, each controlling distinct sculpture quadrants.
Iterations and Challenges

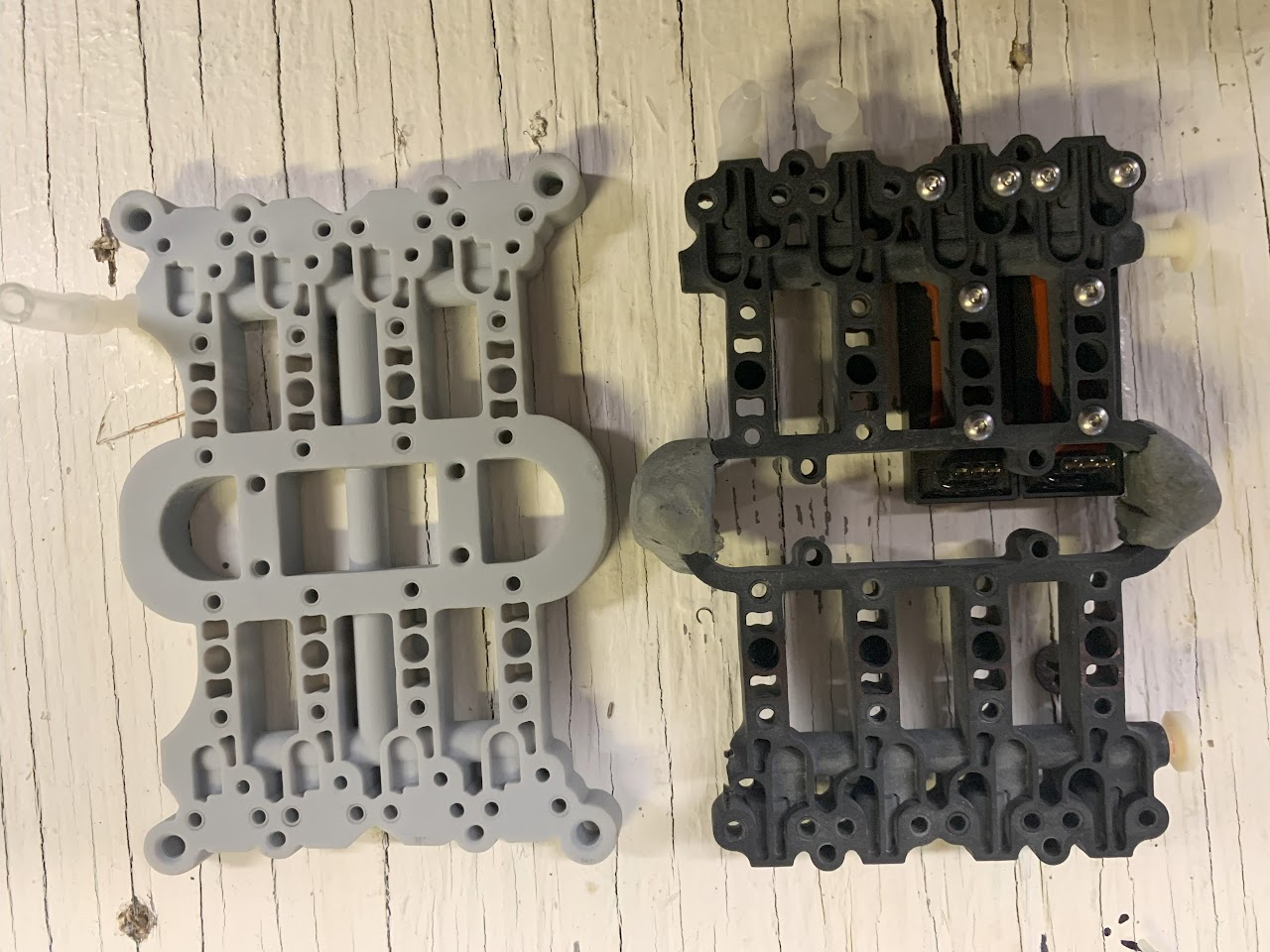
Early versions (v1 through v5) showed progression toward thicker designs after cracking issues appeared. The overlapping tabs and threaded barb inserts proved problematic initially.
A significant challenge emerged during production: the threads wouldn't seal completely - essential for pneumatic functionality. Multiple approaches, including third-party manufacturing, failed to achieve 100% sealing. The breakthrough came when reverting to a four-valve configuration and reprinting resolved the sealing problem.

