GlideX by AutoMotion
Re-imagining the Power Chair
2019 - Seattle Pacific University Junior Design Project
Team: Blake Fuller, Brianna Christiansen, Cody Frost, Chawni Read, Justin Lavigueur

The team aimed to reimagine the power wheelchair by incorporating swerve drive technology - a system enabling independent steering and driving of all wheels. This approach provides three degrees of freedom in horizontal movement, allowing drivers to navigate the built environment more naturally.
What is Swerve Drive?
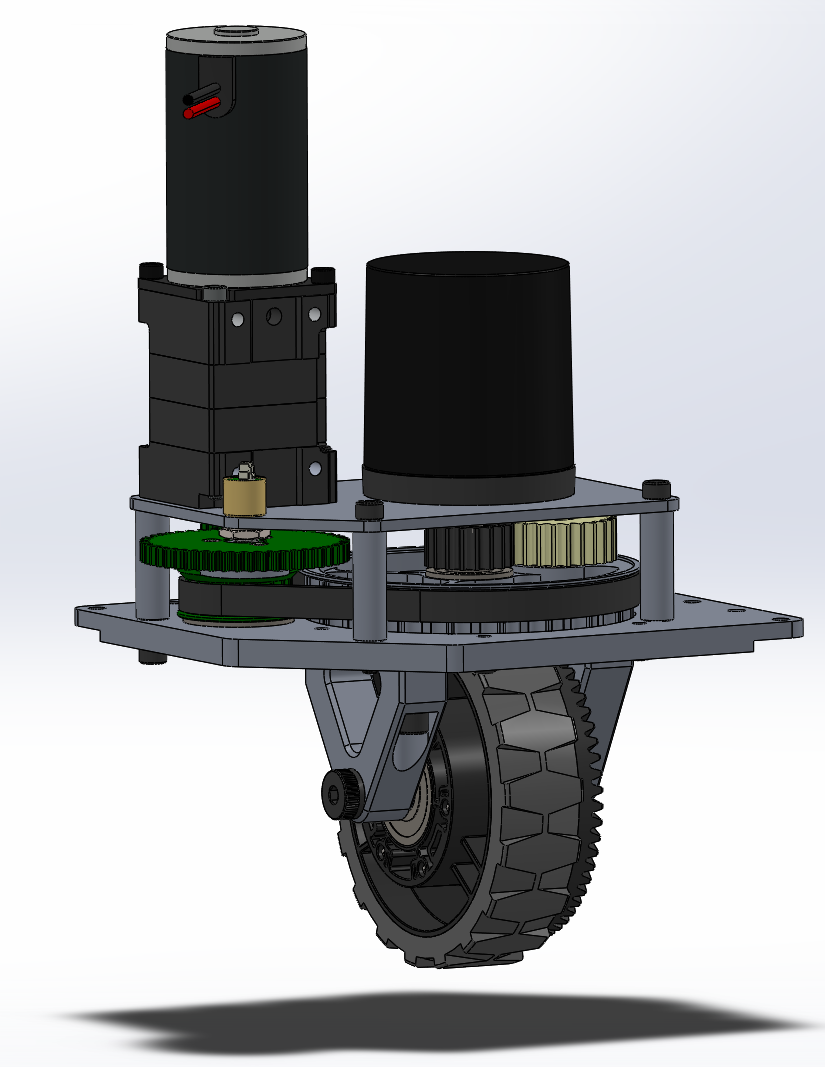
Swerve drive refers to a drive train in which all drive wheels are independently driven and steered, creating a holonomic system that permits simultaneous movement across all horizontal axes.
Drawing from FIRST Robotics Competition experience, the team adapted swerve drive for a wheelchair application. This approach had not been previously attempted in the assistive technology space.
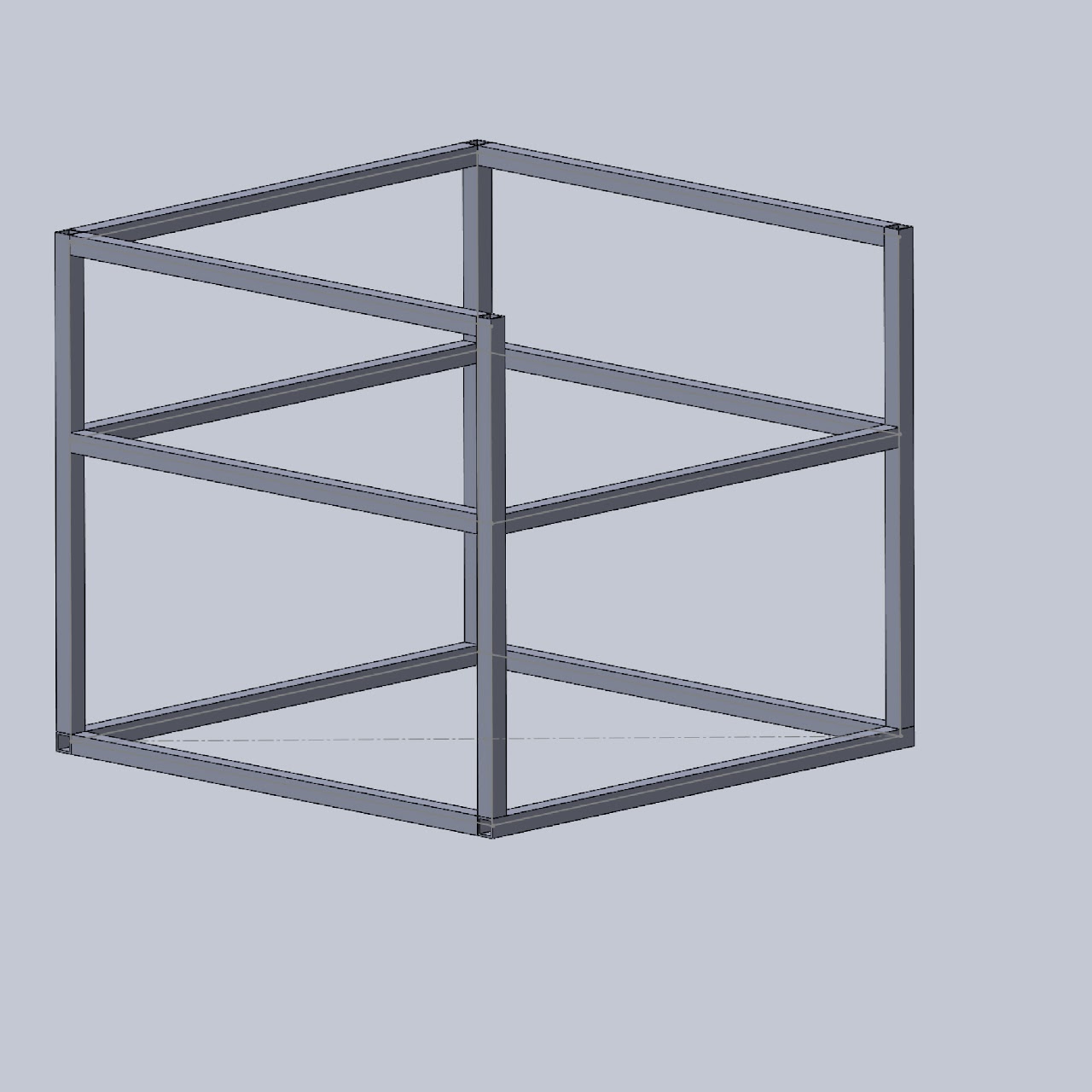
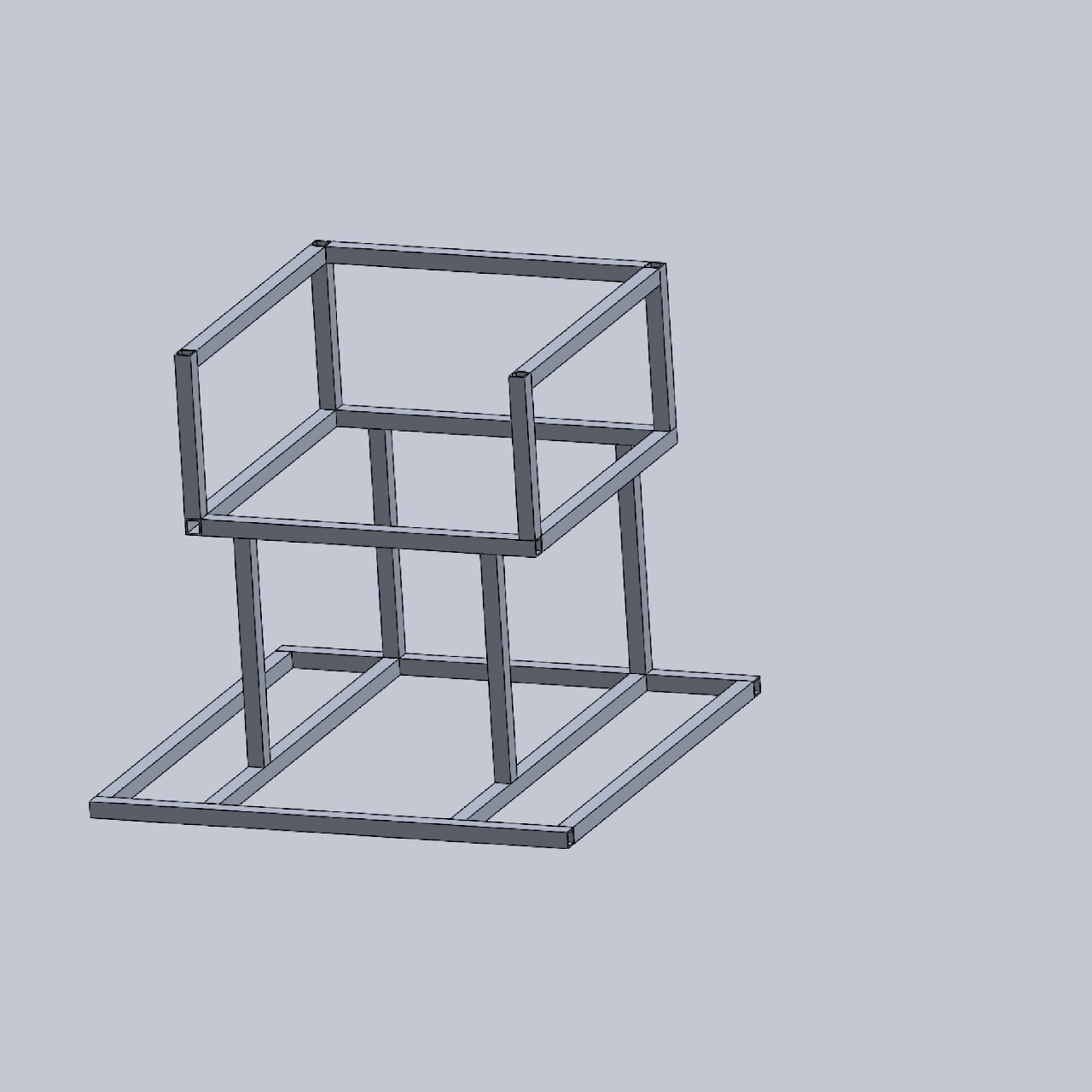
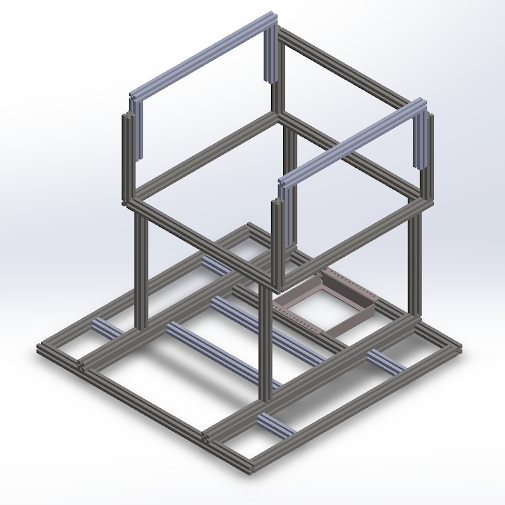
Frame Development
The team selected 80/20 aluminum extrusion for the frame, allowing rapid iteration over the 10-week development period. The frame was standardized at 30 by 30 inches to fit through standard doorways. I took it through multiple iterations of design iterations, refining the structure and mounting points for all components.